The Robotic Farmers of the Future
November 6, 2022Israeli researchers from the Technion are developing a solution that addresses the shortages in seasonal harvesters: robots that pick fruit for us
Throughout history, early summer has often signaled the time to harvest. Harvesting, of course, has evolved considerably. As opposed to ancient times when mobilizing the whole community was necessary to fully harvest grain, there are sophisticated machines nowadays run by just a few individual operators that quickly navigate through fields and efficiently process many acres at a time.
However, in the case of fruits, there is still a need for a great deal of manual labor throughout the harvesting process today, but workers are in short supply. The farming labor and resource shortage is reported in many countries across the world including the United States, Australia, the United Kingdom, Vietnam and Brazil. Unharvested produce leads to a loss of food quality and spurs enormous economic losses, a fact that will become more evident and problematic as the world population continues to increase.
In a new Israeli study, researchers from the Technion developed a ground mobile robot that could drastically advance fruit agriculture and harvesting. The robot, whose development was led by Associate Professor Amir Degani from the Technion’s Environmental, Water, and Agriculture Engineering Department, will have the capability to use one or multiple small-sized drones to perform the operations required in orchards much more accurately and cheaper than the methods used by farmers today.

The study was recently presented at the “Water and Environmental Engineering in the Face of Climate Change” conference of the Environmental, Water, and Agriculture Engineering Department at the Technion’s Faculty of Civil and Environmental Engineering.
The Need for Better Fruit-Picking Robotics
The gap between the number of seasonal laborers and the volume of work is expected to significantly expand as the world population continues to grow. By 2050 there are expected to be more than 9 billion people in the world, and in order to feed them all it will be necessary to increase the volume of food production anywhere from 35-60 percent (unless the whole world switches to a plant-based diet).
One might expect though that with such a highly populated world there would be no shortage of working personnel, but sadly this is not the case.
“People have been moving from villages to cities for decades – and fewer people want to engage in manual labor,” Degani explains. “It’s seen in construction and agriculture, and it happens everywhere – including in countries with very large populations, like India and China. In India, for example, harvesting coconut is a very important task – but fewer and fewer people want to work in that field.”
According to him, the problem also exists in Israel. “As in many Western countries, there are quite a few years in Israel where apples fall to the ground because no one is there to pick them in time.”
Degani believes the solution to these problems lies in robots that know how to pick fruits.
Video by The Laboratory for Civil and Environmental Robotics at the Technion’s Faculty of Civil and Environmental Engineering
“Just as automation has solved many of the problems that plagued field crops, like using machines such as combine harvesters, once we adapt this strategy to plantations farmers will be able to better streamline and reduce the uncertainty that currently surrounds the acquisition of skilled seasonal labor for specific times of the year,” he says.
It is important to note that automating harvests should be approached differently than those used for field crops, which involve rough, large, and overly expensive machines.
“In field crops, massive harvesting is carried out all over the area––usually indiscriminately,” says Degani. “Picking edible fruit should be gentle and selective. The fruits should be picked one by one and handled carefully.”
Interestingly, he claims that the robotic arms currently used in factories, which have a large range of motion and accurate precision capabilities that humans can only dream of, are not suitable for the task.
“Although these robotic arms know how to perform a pre-planned operation, their sensing and decision making capabilities are limited and are not suitable for agriculture,” he says. “Agriculture is a more difficult world. Agriculture takes place in an uncertain environment with fluctuating changes in light and outdoor conditions, so the robot must have complex sensing and decision making capabilities.” According to him, the robot should not be too expensive of an alternative because otherwise many farmers will not be able to afford it.
Call in Air Support
Degani and his team began to approach the challenge of the harvesting robot’s development by first addressing its maneuverability in the orchard, a task more complicated than it sounds.
“In order for the robot to patrol and weave through all the trees and detect pests or ripe apples, for example, it must know where it exactly is,” Degani explains. The orchard environment is relatively homogeneous from a ground point of view, with most of the trees looking about the same and the GPS reception not being particularly reliable.
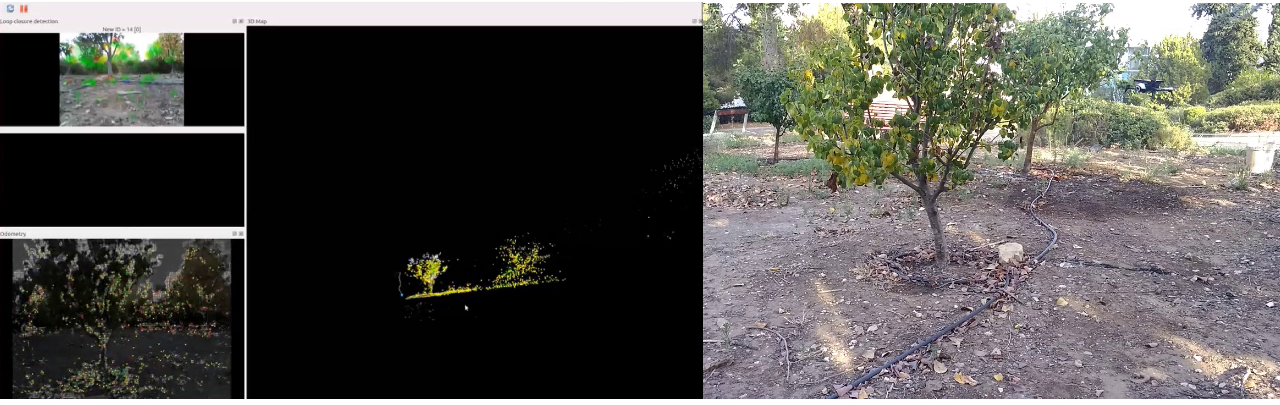
This obstacle gave rise to the idea of establishing a connection between a ground mobile robot and a drone. The researchers found that when utilizing the perspective of a low-flying drone, the top-view observation of the orchard provides a unique signature of every tree formed by the shape of its canopy. The first study on the subject was published in the robotics and automation section of the IEEE magazine.
Currently, researchers are working on additional ways in which the farming robot can use small drones to perform the operations required for harvesting orchards. First, they demonstrated that a drone could hover around a tree, creating a detailed three-dimensional image of each of the trees in the area. These are needed to make the harvesting process more efficient and reflect more modern model of precision agriculture.
“The meaning of ‘precision agriculture’ is that instead of making decisions on issues relating to things like fertilization, irrigation, thinning, pest management, or harvesting at the entire field level, we will look at the agricultural plot at a higher resolution and make such decisions down to the individual tree level,” explains Degani.
This will make it possible to increase the volume of produce, by providing the best conditions for each individual tree, and beyond that, save the use of resources such as water, fertilizer, and potentially dangerous pesticides.
Degani believes the solution lies in the capabilities of a ground mobile robot that knows how to navigate around the wood, perform precise mechanical operations, and even pollinate flowers––another separate project currently under development in the laboratory.
A Shift From Human to Robot?
Today, Degani’s studies are in the prototype stage, and they demonstrate possibilities for future development. In any case, there are already several automation attempts in the fruit harvesting industry represented by Israeli companies such as FFRobotics, a robot equipped with the ability to emulate human hand-picking, and Tevel Aerobotics Technologies, which developed a flying harvester that is scheduled to enter its pilot phase in the coming year.
Video by The Laboratory for Civil and Environmental Robotics at the Technion’s Faculty of Civil and Environmental Engineering
Beyond that, not only is the identity of the harvester expected to shift from human to robot – but the structure of the orchard itself is also speculated to change.
“The way we engineer and grow trees will change, and they will be designed in a way that is right for robotic harvesting,” Degani explains. “Even today you can see in the world apple orchards that look almost like a two-dimensional wall on which fruit grows. This is not genetic engineering but mechanical engineering operations designed to make the orchard grow as efficiently as possible.” The new orchard structure allows for denser planting and is designed to enable easier harvesting for both humans and robots alike. Studies are currently underway to determine the most efficient configuration, in preparation for an era in which robots will enter the agricultural landscape.
In the end, according to Degani, everything is aimed at becoming more efficient simply because we have no other choice.
“Even in modern agriculture, the farmer will be very important, but he will need much fewer working hands,” he says. “Like quite a few things, the data will be at the center, to help him make informed decisions, and the robots will carry out the tasks in the field. This is what will direct the efficiency so that we can reach a sufficient crop target that will feed all humans,” he says.
“Because there will be less land, less resources, and less manpower over time, there is a need to find a solution. Otherwise, fruits like apples will be accessible only to the very rich,” Degani concludes.
This Zavit Article was also published in The Jewish Journal on 10 July 2022

The Drone That Knows When the Forest is Thirsty
A new method makes it possible to detect water stress in trees without touching the leaves
“Food Security is National Security”
On the first day of the 52nd Annual Conference for Science and the Environment, over 220 workshops, panels, and lectures took place, and a lifetime achievement award was presented to Prof. Moshe Shachak. What did we experience on the conference's second day?




